Электронные магнитные захваты
Электромагнитные электронные захваты помогают безопасно, эффективно и долговечно обрабатывать ферромагнитные детали. В интеллектуальной производственной среде скорость и точность являются основными требованиями для магнитных захватов или концевых эффекторов. Кроме того, очень важны энергоэффективность и безопасность.
- Работа со сложными и тяжелыми ферромагнитными заготовками
- Постоянный контроль благодаря умной сенсорной обратной связи
- Прочная конструкция, без движущихся частей
- Безотказность благодаря двух-стабильной конструкции
- Сила удержания до 2160 Н

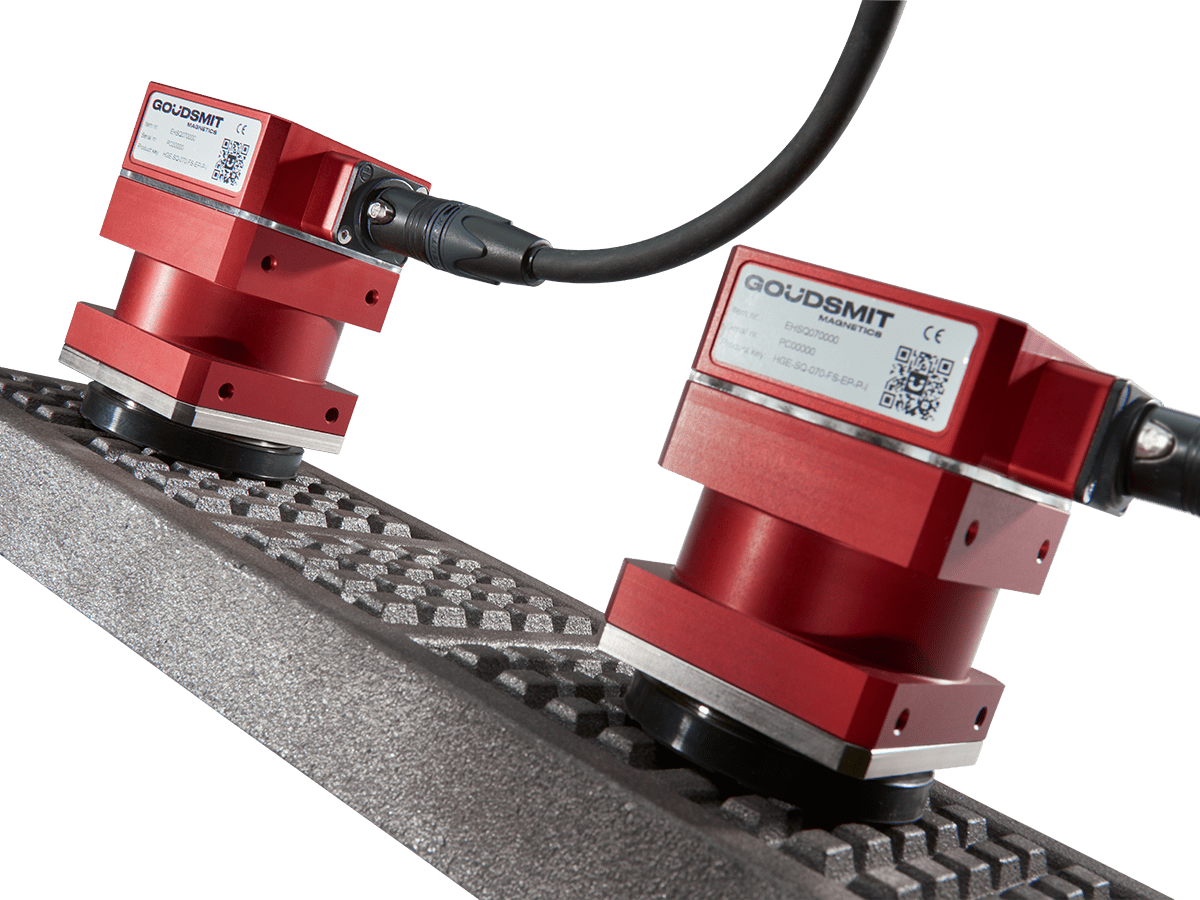
Рабочий орган
Магнитные E-образные захваты идеально подходят для сложных задач, требующих скорости, точности и сенсорной обратной связи. Например, роботы, заряженные системами погрузки и разгрузки, такими как изгибающие ячейки, лазерная сварка и столы для резки или ЧПУ и штамповочные машины.
Переключение осуществляется электронным переключением магнитных полюсов. Таким образом, E-образный захват захватывает заготовку или высвобождает ее. Такая бистабильная конструкция гарантирует, что детали останутся прикрепленными к захвату даже в случае сбоя питания.
Идеальный инструмент EOAT (конец манипулятора) для автоматизации рабочих мест, где нет систем сжатого воздуха. Инновационный электронный захват эффективно работает с источником питания 24 В постоянного тока и требует всего 100 Вт для электрического переключения — в течение 350 миллисекунд. Эти быстрые циклы значительно повышают производительность. Отсутствие движущихся частей делает электронный захват исключительно долговечным и способным легко переключаться на 10 миллионов устройств.
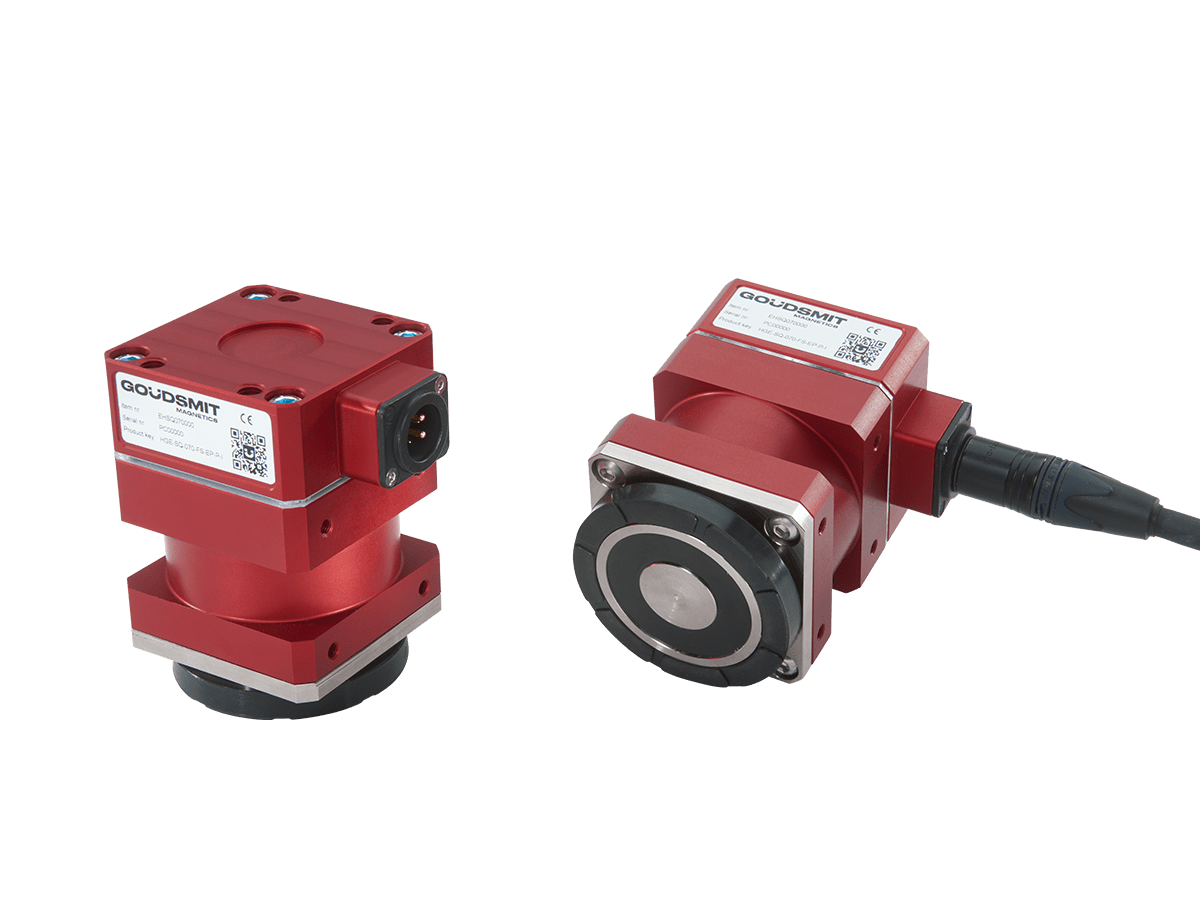
Переключение и управление магнитным захватным устройством
В соответствии с инструкциями, приведенными в прилагаемом руководстве по установке, подключение E-образного захвата является простым. Для питания и логических сигналов ПЛК используется только один кабель. В руководстве также объясняются различные состояния или режимы, в которых может находиться электронный захват.
Электронные захваты Goudsmit оснащены датчиками для следующих функций:
- обнаружение включения/выключения — для информирования ПЛК о состоянии захвата
- обнаружение присутствия продукта — проверка того, удерживает ли захват заготовку
- показания температуры.
Факторы подъемной силы
E-образный захват предназначен для работы со всеми типами ферромагнитных изделий и заготовок. Удерживающая сила зависит от магнитных свойств и химического состава материала, подлежащего обработке. По сравнению с низкоуглеродистой сталью подъемное усилие может быть ниже с другими металлами, см. обзор ниже.
Материал/эффективность
- Нелегированная низкоуглеродистая сталь (<0,3% C), например Fe 360 Fe 510: 100%
- Нелегированная углеродистая сталь (0,3–0,5% C), такая как C15, C45: 80–90%
- Инструментальная сталь из высокоуглеродистого сплава (0,5–1,8% C): 70–80%
- Магнитная нержавеющая сталь (ферритная, мартенситная), такая как AISI430: 60–75%
- Чугун (>1,8% C): 45–50%
- Никель: 10%
- Нержавеющая сталь AISI304: 1 - 3%
- Аустенитная нержавеющая сталь, например AISI316, латунь, алюминий, медь: 0%
Помимо обрабатываемого материала, эти факторы также снижают удерживающую силу:
- Воздушный зазор между обрабатываемой деталью и E-образным захватом. Немагнитные поверхностные слои, такие как покрытия, фольга, ржавчина, грязь, а также шероховатые поверхности, приводят к образованию воздушного зазора и снижению удерживающей силы.
- Контактная поверхность. Когда обрабатываемая деталь полностью контактирует с магнитными полюсами, достигается максимальное удерживающее усилие. При частичном покрытии или уменьшенном контакте, например, из-за перфорации или трудности прикосновения, удерживающая сила уменьшается.
- Толщина обрабатываемой детали. Тонкий листовой материал становится магнитно насыщенным, так что магнитное поле не может быть полностью использовано, и удерживающая сила уменьшается.
- Температура Как более высокая температура окружающей среды (> 30 °C), так и более высокая температура продукта (40–80 °C) снижают магнитную силу. Частое переключение (> 4 циклов/мин) также нагревает внутреннюю магнитную систему.
- Усилия ускорения. При быстром движении детали силы ускорения могут отрицательно повлиять на удерживающую силу. Всегда следите за тем, чтобы силы ускорения на обрабатываемой детали были значительно ниже удерживающей силы.
- Жесткость или гибкость груза. Длинные или гибкие грузы могут провисать. Влияние отклонения на магнит значительно снижает удерживающую силу. Обеспечьте достаточное количество магнитных захватов в нескольких точках захвата, чтобы предотвратить провисание. Также обеспечивают гибкую подвеску магнитных захватов для поглощения отклонения.
Есть ли у вас сомнения относительно условий и возможного ограничения магнита и удерживающей силы? Дополнительное тестирование или обращение к нашим специалистам дадут вам уверенность.