Pneumatische Greifer
Mit pneumatischen Magnetgreifern können Sie Werkstücke und Bleche aus Stahl mit hoher Geschwindigkeit und Präzision sicher bearbeiten. Greifer – auch Endeffektoren genannt – sind ideal, um Ihren Produktionsprozess zu beschleunigen oder zu automatisieren. Stabil, sicher und genau: Robotergreifer sind aufgrund der bistabilen Konstruktion eine zuverlässige End-of-Arm-Lösung.
- Schnelle pneumatische Schaltung
- Mit Permanentmagneten ausgestattet
- End-of-Arm-Tooling von Roboter/Cobot
- Hubkraft: bis 110 kg
- Hochtemperaturversionen

End-of-Arm-Tooling
Pneumatische Magnetgreifer eignen sich ideal für Flachstahlprodukte. Vor allem automatisierte Produktions- und Montagelinien sind mit Magnetgreifern ausgestattet, zum Beispiel in Maschinen oder als Endeffektoren für Roboter. Sie be- und entladen, heben und positionieren Werkstücke in CNC-Maschinen, Falzmaschinen, Abkantpressen, Stanzmaschinen oder Biege-, Laserschneid- und Schweißanlagen.
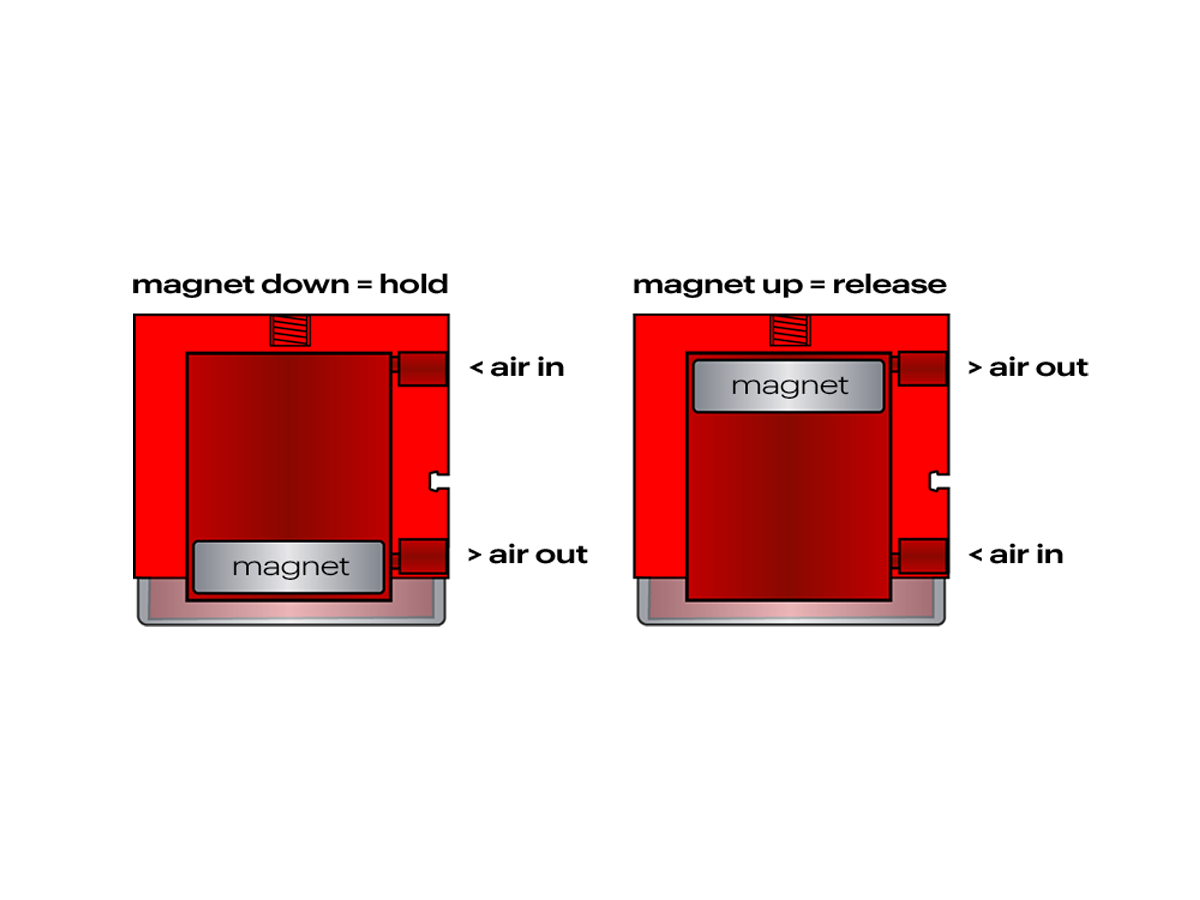
Druckluft bewegt den Magnetkern im pneumatischen Greifer und schaltet das Magnetfeld quasi ein oder aus. So bleiben die Arbeitsstücke auch im Falle eines Stromausfalls an Ort und Stelle. Auch perforierte Bleche werden sicher gehalten.
Die Magnetgreifer für hohe Temperaturen funktionieren zuverlässig in Umgebungen mit bis zu 120 °C. Anwendungsbeispiele für die Hochtemperatur-Greifer sind Bäckereien, Abkantpressen und Automobilproduktionsstraßen.
Unsere Experten beraten Sie gerne zu Zubehör, Modellen und Anwendungen.
Verbindung und Betrieb des Magnetgreifers
Der Magnetgreifer schaltet pneumatisch. Sie können die Druckluft mit einem 5/3- oder 5/2-Wegeventil steuern. Pneumatische Greifer von Goudsmit können mit Sensoren zur Ein-/Aus-Erkennung und Erkennung von vorhandenen Produkten ausgestattet werden. Ein weiteres Zubehör sind Federstößel für zusätzliche Dämpfung.
Hubkraft-Faktoren
Pneumatische Greifer sind für ferromagnetische Produkte und Arbeitsstücke konzipiert. Die maximale Haltekraft hängt von den magnetischen Eigenschaften und der chemischen Zusammensetzung des zu behandelnden Materials ab. Verglichen mit kohlenstoffarmem Stahl kann die Haltekraft von Magnetgreifern bei anderen Materialien geringer sein:
Material/Effizienz
- Nicht-legierter kohlenstoffarmer Stahl (< 0,3 % C) wie Fe 360, Fe 510: 100 %
- Nicht-legierter Karbonstahl (0,3–0,5 % C) wie C15, C45: 80–90 %
- Kohlenstoffreicher (0,5–1,8 % C) legierter Werkzeugstahl: 70–80 %
- Magnetischer Edelstahl (ferritisch, martensitisch) wie AISI430: 60–75 %
- Gusseisen (> 1,8 % C): 45–50 %
- Nickel: 10 %
- Edelstahl AISI304: 1–3 %
- Austenitischer Edelstahl wie AISI316, Messing, Aluminium, Kupfer: 0 %
Zusätzlich zum Material des Werkstücks reduzieren diese Faktoren ebenso die Haltekraft:
- Eine Luftlücke zwischen Werkstück und Greifer. Nicht-magnetische Oberflächenschichten wie Lackierungen, Folien, Rost, Schmutz oder auch raue Oberflächen führen zu einer Luftlücke und geringerer Haltekraft.
- Kontaktfläche. Wenn sich das Werkstück in vollem Kontakt mit den magnetischen Polen befindet, ist die maximale Haltekraft erreicht. Bei nur teilweiser Abdeckung oder geringerem Kontakt, etwa weil das Werkstück perforiert oder schwer zu fassen ist, verringert sich die Haltekraft.
- Dicke des Werkstücks. Bei dünnen Blechen (≤1 mm) tritt der sogenannte „Abschäleffekt“ auf. Die maximale Abreißkraft nimmt dadurch ab. Hier empfiehlt sich eine Konstruktion aus mehreren kleineren Greifern (z. B. 40 x 40 mm) anstelle einer Konstruktion mit zwei großen Greifern.
- Temperatur. Sowohl eine höhere Umgebungstemperatur (>30 °C) als auch eine höhere Produkttemperatur (40–80 °C) reduzieren die Magnetkraft. Die Hochtemperatur-Greifer sind diesen Effekten gegenüber resistenter.
- Beschleunigungskräfte. Wenn sich ein Werkstück schnell bewegt, können sich die Beschleunigungskräfte negativ auf die Haltekraft auswirken. Stellen Sie stets sicher, dass die Beschleunigungskräfte am Werkstück deutlich unter der Haltekraft liegen.
- Steifheit oder Flexibilität der Last Lange oder flexible Lasten können sich absenken oder verbiegen. Der Biegeeffekt auf den Magneten verringert die Haltekraft deutlich. Bringen Sie genügend Magnetgreifer an mehreren Greifpunkten an, um ein Verbiegen zu vermeiden. Sorgen Sie zudem für eine flexible Aufhängung der Magnetgreifer, um die Verbiegung zu absorbieren.
Haben Sie Zweifel an den Umgebungsbedingungen und möglichen Einschränkungen für die Magnet- und Haltekraft? Dann führen Sie zusätzliche Tests durch oder wenden Sie sich an die Goudsmit Experten.